Background:
In some cases, laparoscopic surgery is performed with large master-slave systems (Figure 1, Left) that actuate long slender articulated instruments inside the abdomen. These instruments can contain up to 7 cables that are used to actuate a large number of tip components (Figure 1, Right).

(figure 1: Da Vinci surgical master-slave system & 7DOF articulating instrument)
The problem
Due to the complexity of these articulated instruments, they cannot be disassembled for inspection and cleaning. This limits their lifespan and makes them expensive and potentially unsafe.
The solution
To address these issues, we are developing a new method for articulating laparoscopic instruments. Different from the hinged instruments used today, that operate by means of cables and pulleys, the new concept operates without cables and was named Shaft Actuated Tip Articulation (SATA). Instead of cables, SATA uses independently revolving tubes with on one end simple cut-outs that force two sliders to move in axial (but opposite) direction. Currently we are working on a SATA mechanism with four degrees of freedom (Figure 2) in close collaboration with the techno-starter Surge-On Medical. This system is developed to fit the DaVinci robotic system.
To demonstrate our SATA instruments, a new master-slave system is being built in close collaboration with the Leiden Instrumentation Academy (LIS), as depicted in Figure 3.
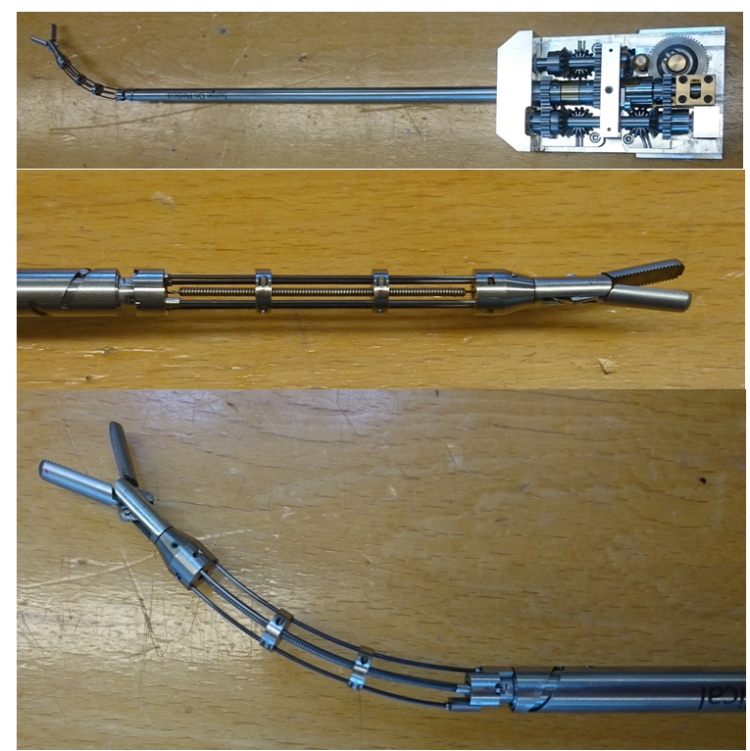
(figure 2: 7DOF instrument under development)
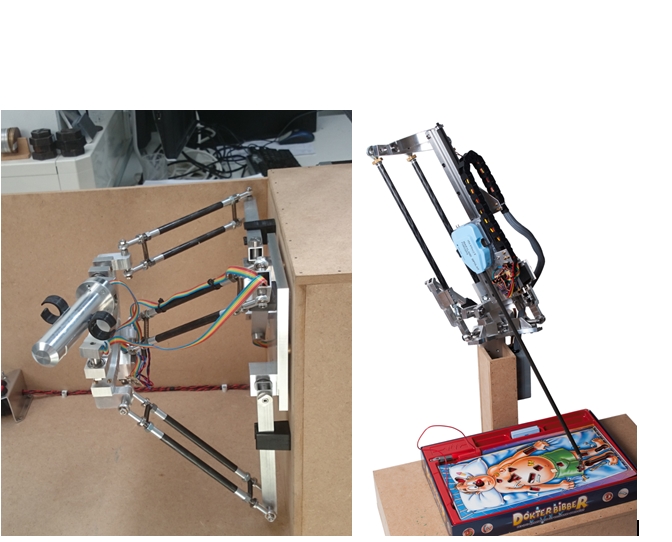
(Figure 3: Demonstrator platform (left: master, right: slave))
Thesis objective: Develop a new hybrid 2-DOF tip hinge (combination of a stiff hinge mechanism and flexible Nitinol wires) that has a smaller bending radius as the original concept (Figure 2) and is still stiff. The performance of the new mechanism has to be evaluated experimentally.
Secondary objective. The updated multi DOF instrument with hybrid hinge should be integrated in the upgraded master-slave system so it can be used as a demonstrator.
Required Interests:
Matlab (programming and building interfaces)
Labjack I/O sensors and actuators (stepper motors and servos)
Design (Solid works)
Machining (some of ) your own components.
Testing (writing test protocols)
Supervisors:
Dr.Ir Tim Horeman, BioMechanical engineer
t.horeman@tudelft.nl
Dr.Ir. Dennis van Gerwen, BioMechanical engineer
d.j.vangerwen@tudelft.nl
Project Co-Workers:
Ing. Frank Schilder, Instrumentation specials
F.Schilder@tudelft.nl |

